



近年来,形变可控的应激变形聚合物得到越来越广泛的关注,在力学领域,能够实现形状转变的双稳态结构得到了越来越多的研究,而针对三稳态结构转变的研究却依然甚少。而且在传统聚合物形状转变领域,关于可控形变的理论预测研究也显缺乏。
研究团队针对此问题,通过构建形状记忆聚合物/商用橡胶双层结构,调节形状记忆材料的拉伸率以及双层结构的复合方式,实现了复合材料形状变形的精准控制及三稳态转变性能。理论分析及有限元模拟均证实和阐明了其转变机理。
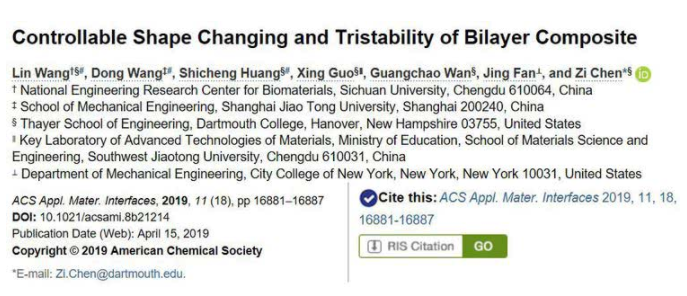
图一. 通过调节复合材料的拉伸率及粘贴方式实现材料螺距及曲率可控的形状转变。
通过改变双层结构中形状记忆材料的拉伸率及复合方式,研究团队可以精准的控制材料形状变形的螺距及曲率,并且理论分析结果与实验结果一致。
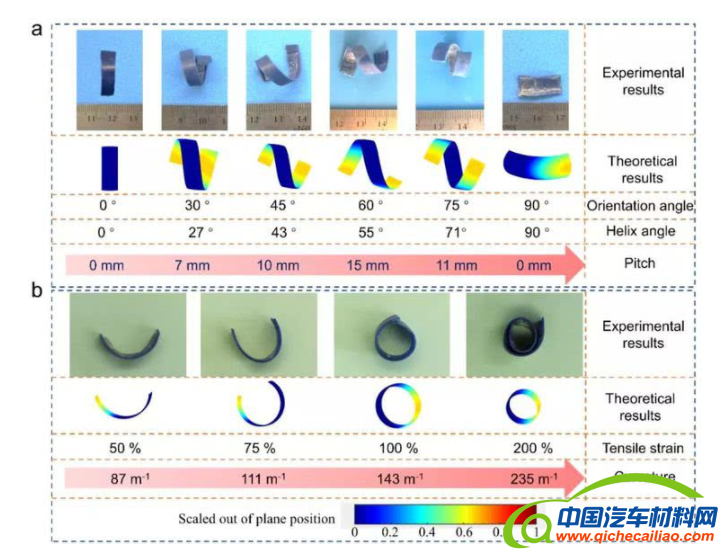
图二.(a)材料在左旋、右旋及hemihelix形状之间的三稳态转变性能;(b)基于能量转换的形状转变理论分析;(c)有限元模拟双层结构热刺激下由直条形状到hemihelix形状的转变行为。
通过调节双层结构的粘贴方式,研究团队在热刺激条件下可以得到半螺旋形(hemihelix)的形状,此形状具有较好的三稳态转变性能,而且研究者们通过理论分析及有限元模拟证实了其转变行为。
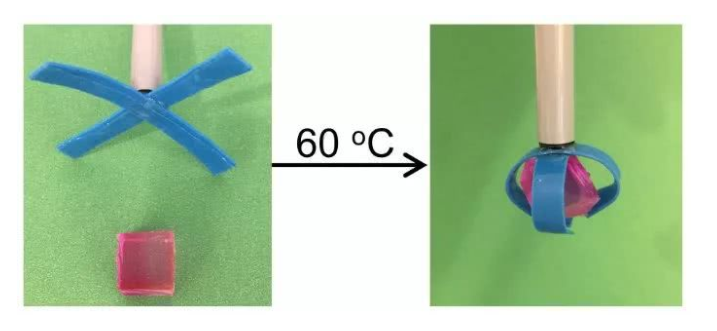
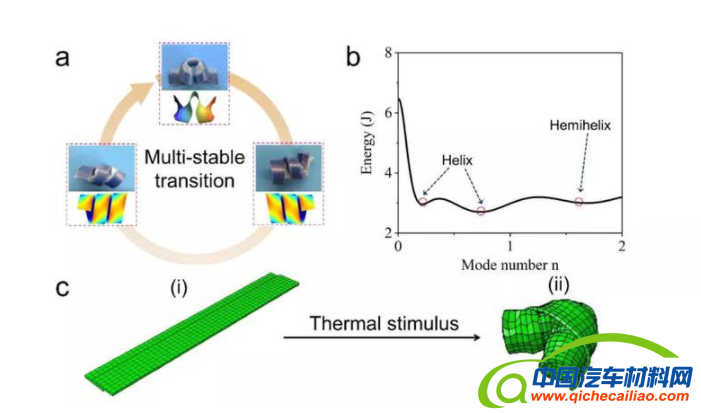
图三. 四爪模型在温度刺激下的抓取性能研究。
最后作者构建了一个四爪模型,在热刺激下其可以抓起其自身重量30倍的重物。此工作为构建智能驱动、软体机器人等领域提供了新的设计思路和理论指导。



